Durante mucho tiempo, la idea de robots moviéndose de forma autónoma parecía algo lejano o reservado para grandes industrias. Sin embargo, hoy estos sistemas empiezan a formar parte de entornos reales, donde la tecnología necesita adaptarse a espacios cambiantes y a dinámicas poco predecibles. Más que una promesa futurista, este tipo de soluciones se está convirtiendo en una respuesta práctica a problemas cotidianos relacionados con movimiento, eficiencia y coordinación dentro de procesos cada vez más complejos.

Qué se entiende por robótica móvil y por qué está ganando atención
La robótica móvil hace referencia a sistemas robóticos diseñados para desplazarse dentro de un entorno, interpretar lo que ocurre a su alrededor y actuar en consecuencia. A diferencia de soluciones fijas, estos sistemas trabajan con escenarios cambiantes, lo que los vuelve especialmente útiles en contextos donde el espacio, las rutas o las prioridades varían con frecuencia. Su crecimiento responde a una necesidad clara: automatizar sin rigidez.
Diferencias frente a la robótica tradicional
En la robótica tradicional, el entorno suele estar completamente controlado. Las tareas se repiten en el mismo punto, con movimientos predefinidos y poca variación. Este enfoque es eficiente cuando todo permanece estable, pero pierde efectividad ante cualquier cambio operativo o alteración del espacio.
Los sistemas móviles introducen una lógica distinta. Aquí, el robot no depende de una única estación ni de un recorrido fijo, sino que debe interpretar el espacio, evitar obstáculos y ajustar su desplazamiento según lo que ocurre alrededor. Esta capacidad de adaptación es una de las claves que distinguen a la robótica móvil frente a modelos más rígidos.
Esta diferencia cambia el enfoque de la automatización: ya no se trata solo de ejecutar correctamente una tarea, sino de hacerlo mientras el entorno se transforma y exige respuestas dinámicas.
Por qué su desarrollo se aceleró en los últimos años
El avance de sensores, procesamiento de datos y software de navegación permitió que estos sistemas pasaran de ser experimentales a funcionales. Antes, muchas soluciones dependían de marcas físicas o rutas rígidas; hoy, la navegación es más flexible y tolera cambios con mayor precisión, lo que amplió notablemente su campo de aplicación.
Además, los entornos de trabajo actuales exigen adaptabilidad constante. Almacenes, plantas y centros de servicio cambian su configuración con frecuencia, y la robótica móvil encaja mejor en esa realidad porque no obliga a rediseñar todo el espacio cada vez que el proceso se ajusta.
La búsqueda de eficiencia también impulsó su adopción, especialmente en tareas donde el movimiento consume tiempo y recursos sin aportar valor estratégico directo.
Tal vez te puede interesar leer: 15 gadgets para oficina que aumentarán tu productividad diaria

Cómo funcionan estos sistemas en entornos reales
Para operar correctamente, estos robots combinan sensores, software y lógica de control que trabajan de forma continua. El sistema percibe el entorno, procesa la información y ejecuta acciones en ciclos constantes, ajustándose a lo que sucede alrededor. Esta coordinación es la base de su funcionamiento práctico.
Sensores y percepción del entorno
Los sensores permiten detectar distancias, obstáculos y movimiento. Cámaras, lidar y otros dispositivos recopilan información que el sistema utiliza para entender el espacio en el que se mueve.
No se trata solo de “ver”, sino de interpretar lo que se detecta y diferenciar entre elementos estáticos y dinámicos. Esa capacidad es clave para operar en espacios compartidos con personas.
Una percepción deficiente suele ser el origen de muchos fallos, por lo que este componente es crítico para la estabilidad del sistema.
Navegación y toma de decisiones
Una vez que el entorno es interpretado, el sistema debe decidir cómo desplazarse. En la robótica móvil, este proceso implica planificar rutas, recalcular trayectos y ajustar velocidades según el contexto, teniendo en cuenta tanto los objetivos operativos como las condiciones del espacio.
En la práctica, la decisión más rápida no siempre es la mejor. La navegación prioriza seguridad y coherencia antes que velocidad pura, especialmente en entornos compartidos donde interactúan personas, obstáculos y otros sistemas móviles.
Cuando este equilibrio está bien logrado, la robótica móvil se integra de forma natural al flujo operativo, funcionando como un apoyo constante sin generar interrupciones ni fricciones innecesarias.
Tal vez te puede interesar: Top 10 robots con inteligencia artificial

Principales áreas donde se aplica la robótica móvil
Este tipo de soluciones se implementa principalmente donde el traslado interno es un cuello de botella. Su valor aparece cuando reduce recorridos innecesarios, estabiliza tiempos y libera a las personas de tareas repetitivas relacionadas con movimiento.
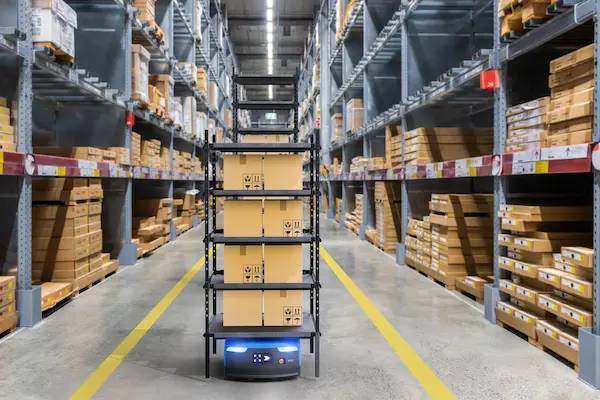
Logística y almacenes
En almacenes, estos sistemas se utilizan para mover productos o materiales entre zonas, optimizando recorridos que antes dependían del desplazamiento constante del personal. En este contexto, la robótica móvil aporta consistencia en los tiempos de traslado, lo que ayuda a estabilizar el ritmo de la operación más allá de la velocidad puntual.
Además, permite adaptarse a cambios en el layout sin necesidad de rediseñar toda la operación, siempre que exista un mínimo de orden espacial y señalización clara. Esta flexibilidad resulta clave en entornos donde la configuración varía según la demanda o el volumen de trabajo.
El resultado suele ser un flujo más predecible y menos dependiente del esfuerzo físico humano, donde la robótica móvil actúa como un soporte continuo para las tareas logísticas del día a día.
Tal vez te puede interesar: 7 tendencias empresariales para este 2026

Salud y servicios
En entornos como hospitales, clínicas y centros de atención, estos sistemas se aplican principalmente para el traslado interno de insumos, equipos o materiales entre distintas áreas. En este contexto, la robótica móvil ayuda a ordenar recorridos, reducir tiempos de espera y mejorar la coordinación en espacios donde la precisión y la puntualidad son fundamentales.
A diferencia de otros sectores, aquí la confiabilidad pesa tanto como la tecnología. Los sistemas deben operar de forma predecible, respetando flujos humanos y adaptándose a espacios compartidos sin interferir en la atención ni generar riesgos innecesarios.
Cuando se integran correctamente, estos sistemas se convierten en un apoyo silencioso para el personal, permitiendo que los equipos humanos concentren su tiempo y esfuerzo en tareas donde el contacto directo y el criterio profesional son esenciales.
Beneficios reales en entornos profesionales
El principal aporte de estos sistemas es la mejora del flujo de trabajo en contextos donde el movimiento interno suele generar cuellos de botella. En ese sentido, la robótica móvil permite reducir interrupciones y ordenar procesos que antes dependían en exceso del ritmo individual, facilitando que las personas se enfoquen en tareas donde el criterio humano realmente aporta valor. Además, mejora la trazabilidad y el control operativo en entornos donde la continuidad es clave.
Eficiencia y reducción de fricción
La automatización del traslado interno elimina tiempos muertos y variaciones innecesarias, lo que se traduce en operaciones más estables y fáciles de planificar. Al reducir microtareas repetitivas, los equipos trabajan con menos desgaste físico y mental, manteniendo un mayor nivel de enfoque a lo largo de la jornada.
El impacto de la robótica móvil suele notarse más en la continuidad del proceso que en una tarea aislada. Cuando el movimiento deja de ser una preocupación constante, el flujo general se vuelve más predecible y eficiente, incluso en entornos donde las condiciones cambian con frecuencia.
Seguridad y control
Al asumir parte del movimiento, se reduce la exposición a riesgos físicos asociados a traslados constantes. También disminuyen errores logísticos, como entregas incorrectas o pérdidas.
Cuando el sistema está bien configurado, su comportamiento es predecible, lo que mejora la seguridad en espacios compartidos.
También te puede interesar: 10 casos más comunes de fraudes cibernéticos

Tipos de sistemas de robótica móvil más utilizados
Dentro de la robótica móvil existen distintos tipos de sistemas, diseñados según el entorno en el que operan y la función que deben cumplir. No todos los robots móviles responden a la misma lógica ni tienen el mismo nivel de autonomía, y entender estas diferencias ayuda a comprender por qué se aplican de manera distinta en logística, industria, servicios o espacios compartidos. Esta variedad es justamente lo que ha permitido que se adapte a escenarios muy diversos sin depender de un único modelo tecnológico.
Robots móviles autónomos
Los robots móviles autónomos están diseñados para operar sin intervención humana directa durante su funcionamiento habitual. Utilizan sensores, mapas y algoritmos de navegación para desplazarse por un entorno, detectar obstáculos y decidir rutas de forma continua mientras cumplen una tarea específica.
Este tipo de sistemas resulta especialmente útil en espacios donde el movimiento es constante y no siempre predecible. Al no depender de recorridos fijos, pueden adaptarse a cambios en el entorno, como pasillos ocupados o rutas bloqueadas, sin detener la operación.
En la práctica, su valor está en la estabilidad que aportan al flujo de trabajo. Aunque no sustituyen la supervisión humana, reducen la necesidad de intervención constante y permiten que los procesos de traslado se mantengan activos de forma regular.
Robots colaborativos con movilidad integrada
En este caso, la robótica móvil se combina con la interacción directa con personas. Estos robots están pensados para compartir espacios de trabajo con usuarios humanos, por lo que su diseño prioriza la seguridad, la previsibilidad de movimiento y la adaptación al comportamiento del entorno.
A diferencia de los sistemas completamente autónomos, los robots colaborativos móviles suelen operar a velocidades controladas y con reglas más estrictas de navegación. Esto permite que trabajen cerca de personas sin generar riesgos innecesarios ni interrumpir la dinámica del espacio.
Su principal aporte no está solo en la automatización, sino en el apoyo a tareas donde la presencia humana sigue siendo central.
Plataformas móviles inteligentes
Las plataformas móviles inteligentes funcionan como bases tecnológicas sobre las que se pueden integrar distintos módulos y aplicaciones. A diferencia de otros sistemas más cerrados, están pensadas para adaptarse a múltiples funciones según las necesidades del entorno, lo que las hace especialmente útiles en escenarios donde los procesos evolucionan con el tiempo y la robótica móvil requiere flexibilidad operativa.
Este enfoque modular permite que un mismo sistema pueda cumplir distintos roles sin requerir cambios estructurales profundos. En entornos donde conviven varios equipos y tecnologías, estas plataformas facilitan una visión más ordenada del ecosistema, especialmente cuando se articulan con prácticas de gestión de dispositivos móviles, que ayudan a mantener control, coherencia y continuidad operativa sin afectar el funcionamiento del sistema.
Gracias a esta flexibilidad, las plataformas móviles inteligentes suelen tener una vida útil más larga y una mayor capacidad de adaptación. No se trata solo de mover un robot, sino de integrarlo de forma sostenible dentro de un entorno tecnológico que necesita crecer sin volverse caótico.
También te puede interesar: Tendencias 2026 en ciberseguridad corporativa

Retos que siguen presentes
A pesar de sus ventajas, estos sistemas no están exentos de desafíos. El mantenimiento, la adaptación a entornos cambiantes y la coordinación entre equipos son aspectos que requieren planificación para evitar problemas a largo plazo. Con la robótica móvil, estos retos adquieren mayor relevancia a medida que los sistemas se integran en operaciones reales y de mayor escala.
Superar estos desafíos no depende únicamente de la tecnología, sino también de cómo se gestiona su implementación, el seguimiento operativo y la capacidad de ajuste frente a cambios continuos en el entorno de trabajo.
Mantenimiento y actualizaciones
El rendimiento depende tanto del software como del estado físico del equipo. Sensores sucios, baterías degradadas o ruedas en mal estado afectan directamente la operación.
Las actualizaciones también forman parte del ciclo normal y deben gestionarse con criterio para no generar cambios inesperados.
La continuidad operativa depende de una revisión constante, no solo de la instalación inicial.
Coordinación entre múltiples sistemas
Cuando en un mismo entorno operan varios sistemas de robótica móvil al mismo tiempo, la coordinación se vuelve un factor clave para que el funcionamiento sea realmente eficiente. No se trata solo de que cada robot cumpla su tarea de forma aislada, sino de que todos puedan convivir sin interferencias, evitando cruces innecesarios, bloqueos de rutas o tiempos de espera prolongados que afecten el flujo operativo.
A medida que aumenta el número de equipos, también crece la complejidad del entorno. Por eso, es fundamental que existan reglas claras de circulación, prioridades bien definidas y una visión global del funcionamiento del conjunto. Sin esa coordinación, incluso sistemas bien diseñados pueden generar fricción en lugar de eficiencia.
Cuando la coordinación está bien resuelta, los sistemas móviles trabajan de forma más fluida y predecible. Esto no solo mejora el rendimiento operativo, sino que también facilita la adaptación a cambios futuros, permitiendo que el entorno evolucione sin perder estabilidad ni control.
Conclusión
Este tipo de tecnología no destaca por ser llamativa, sino por resolver un problema muy concreto: el movimiento dentro de procesos que cambian constantemente. El valor de la robótica móvil está en su capacidad de adaptarse a entornos reales, reducir fricción operativa y aportar continuidad allí donde los sistemas tradicionales resultan rígidos. Bien aplicada, la robótica móvil deja de percibirse como una innovación aislada y pasa a formar parte natural del funcionamiento cotidiano de las organizaciones.
